Voraussetzungen
explizite und implizite Integrationsverfahren von Differentialgleichungen
Lerninhalte
visuelle Erkenntnis der unterschiedlichen Lösungen von impliziten und expliziten Verfahren
Einschätzen der “Steifheit” einer DGL
Stabilität des expliziten versus impliziten Eulerverfahrens#
Bestimmte ODEs lassen sich mit impliziten Verfahren besser lösen als mit expliziten Verfahren. Diese ODEs bezeichnen wir als steif. Das möchten wir an einem kleinen Modellproblem demonstrieren.
Entscheidend dafür ist, ob eine hohe maximale Steigung vorliegt. Diese wird mit der Lipschitzkonstanten beschrieben, die eine obere Schranke der Steigung \(f_y\) aufstellt (mit der ODE \(y' = f(t,y)\)).
. Je höher die Lipschitz-Konstante, desto kleiner muss oft die notwendige Schrittweite \(h\) gewählt werden. Für das explizite Eulerverfahren gilt \(h<\frac{2}{|L|}\).
Stabilität der Dahlquist- und Prothero-Robinson-Gleichungen#
Ein geeignetes Stabilitätsproblem ist die inhomogene Prothero-Robinson-Gleichung mit
\(g(t)\) ist eine glatte Funktion.
Die analytische Lösung lautet \(y(t) = e^{-\lambda t}(y_0-g_0) + g(t)\). Für \(λ≫1\) konvergiert \(y(t)\) schnell gegen \(g(t)\). Außerdem ist die Lipschitzkonstante leicht zu ermitteln mit \(|y'|_\text{max} = \lambda\), also \( h < \frac{2}{\lambda} \) für das explizite Eulerverfahren.
Für \(g(t) = 0\) entspricht die Prothero-Robinson-Gleichung der Dahlquist-Gleichung, also der ODE der Form \(y'=-λy,λ>0,y_0=1\) mit der exakten Lösung \(y(t)=e^{-λt}\).
Für \(g(t) = const.\) lautet die DGL \(y' = -\lambda (y - g)\) mit der Lösung \(y(t) = g + e^{-λt}\), die gegen \(g\) konvergiert. Bei Anwendung des impliziten Eulerverfahrens erhalten wir \(y_{k+1} = \frac{y_k + h\lambda g}{1+h\lambda}\).
Herleitung von \(y_{k+1}\)
Für das implizite Eulerverfahren lautet die Forschrift allgemein
In diesem Fall erhalten wir
Aufgabe 1#
Weisen Sie nach, dass \(y(t)=g(t)+e^{-λt} (y_0-g_0)\) die exakte Lösung der ODE für allgemeine \(g(t)\) ist.
Aufgabe 2#
In dieser Übung sollen Sie optisch kennen lernen, wie sich die Lösungen des expliziten und impliziten Eulerverfahrens unterscheiden. Damit können Sie auch ein Gefühl dafür entwickeln, was steife Funktionen auszeichnet.
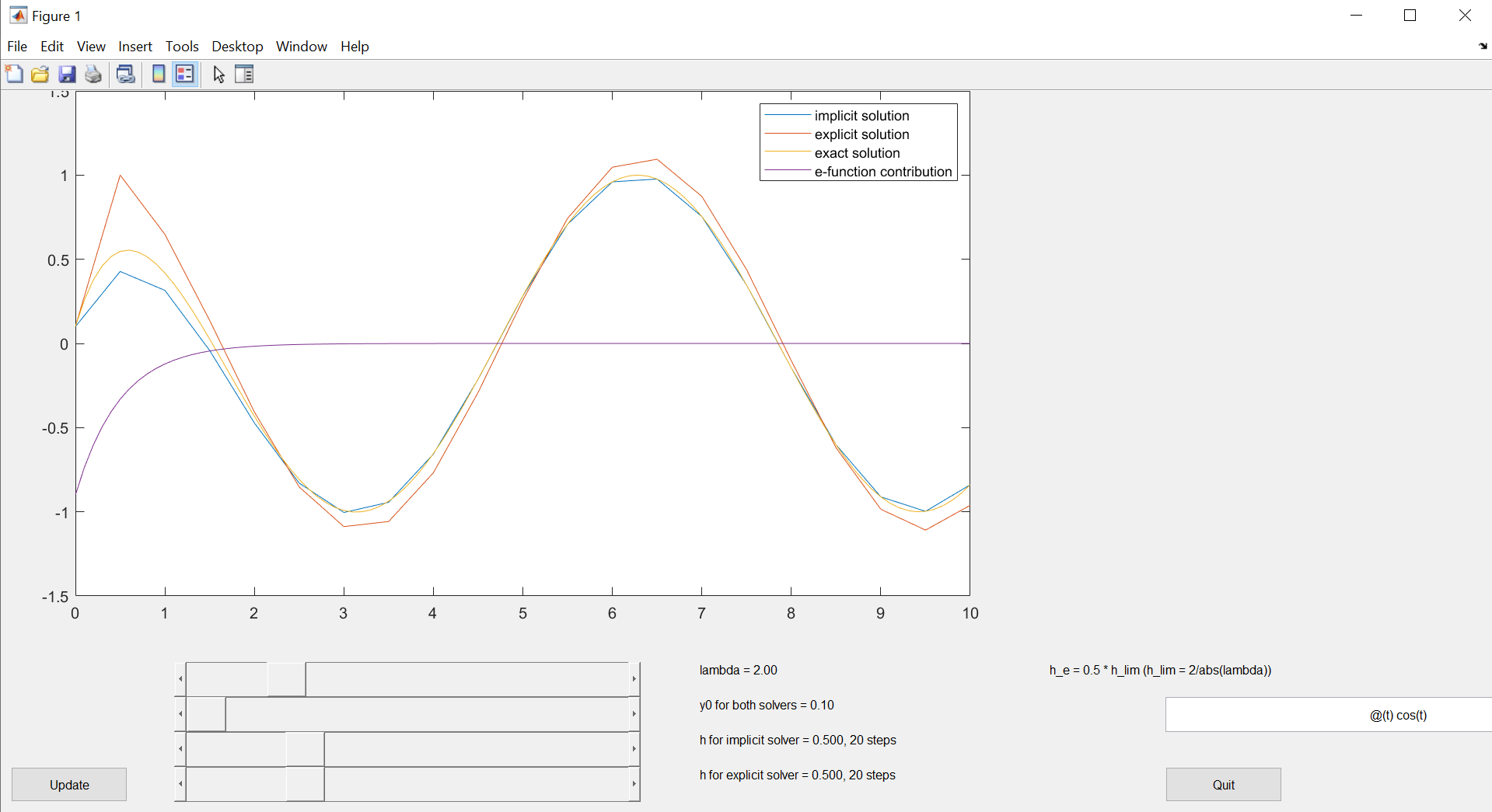
Mit dem unten stehenden Code können Sie in Octave bzw. Matlab eine App ausführen, die Ihnen erlaubt, die Prothero-Robinson-Gleichung mit dem für Sie fertig implementierten expliziten und impliziten Eulerverfahren zu lösen und die Lösungen zu vergleichen. Sie können die wesentlichen Parameter (\(\lambda, y_0, h_\text{explizit}, h_\text{implizit}\)) mit Schiebereglern variieren.
Variieren Sie nun mithilfe der App die verfügbaren Parameter und die Funktion für \(g(t)\). Gegebenenfalls müssen Sie den Code lokal ausführen.
Wie unterscheiden sich die Lösungen beider Verfahren?
Erkennen Sie für \(t=0\), dass die explizite Lösung immer genau die Steigung der Lösung annimmt?
Was passiert, wenn \(h\) für das explizite Verfahren nur minimal kleiner als \(\frac{2}{|\lambda|}\) ist? Was passiert, wenn \(h\) größer ist?
Bei welchen Parametern ist das explizite Verfahren nicht mehr hilfreich? Was macht die “Steifheit” der resultierenden Funktionen qualitativ aus?
Probieren Sie für \(g(t)\) beispielsweise aus
\(g(t) = 0\) (entspricht der Dahlquist-Gleichung)
\(g(t) = \)
t.^2(da die Rechnung mit Matrizen durchgeführt wird, ist die Punkt-Notation nötig)\(g(t) = \cos t\)
\(g(t) = \sin t\)
… und was Sie noch interessiert.
Octave Code
Hinweis
Falls Sie Octave von Ihrer Konsole aufrufen, rufen Sie octave --persist <filename> auf, um das Ausgabefenster geöffnet zu halten.
Show code cell source
%graphics_toolkit (gt)
close all
clearvars
fi.fig = figure(1,'position',[0.5 0.5 1450 700]);
fi.ax = axes("position",[0.05 0.3 0.6 0.7]);
function updatefig(obj, init)
if nargin <2
init = false;
else
init = true;
endif
fi = guidata(obj);
replot = false;
recalc = false;
switch (obj)
case {fi.update_button}
recalc = true;
replot = true;
case {fi.quit_button}
close all;
case {fi.h_e_slide,fi.h_i_slide,fi.y0_slide,fi.update_button,fi.lambda_slide}
recalc = true;
case {fi.g_field}
recalc = true;
endswitch
if (recalc || init)
%% input parameters
h_e = get(fi.h_e_slide, 'value');
fi.h_i = get(fi.h_i_slide, 'value');
y0 = get(fi.y0_slide, 'value');
fi.lambda = get(fi.lambda_slide, 'value');
fi.fcn_g = str2func(get(fi.g_field,'string'));
%% explicit form of ODE, g' with finite differences
fi.fcn_proth = @(t,y) - fi.lambda* (y - fi.fcn_g(t)) + (fi.fcn_g(t+fi.h_i)-fi.fcn_g(t-fi.h_i))/(2*fi.h_i);
%% time scale
tmin = 0;
tmax = 10;
tspan = tmin:0.01:tmax;
%% base function g
g0 = fi.fcn_g(0);
%% solving with explizit Euler method
t_e = tmin:h_e:tmax;
fi.y_e = zeros(size(t_e));
y_e(1) = y0;
for i = 2:length(t_e)
y_e(i) = y_e(i-1) + h_e * fi.fcn_proth(t_e(i-1),y_e(i-1));
end
%% solving with implicit Euler method
t_i = tmin:fi.h_i:tmax;
y_i=zeros(size(t_i));
y_i(1)=y0;
for i = 2:length(t_i)
y_i(i) = ( y_i(i-1) + fi.h_i*fi.lambda*fi.fcn_g(t_i(i)) + fi.fcn_g(t_i(i))-fi.fcn_g(t_i(i-1))) / (1+fi.h_i*fi.lambda);
end
replot = true;
endif
if (replot)
fi.plot = plot(t_i,y_i,t_e,y_e,tspan, fi.fcn_g(tspan) + exp(-fi.lambda*tspan)*(y0-g0), tspan, exp(-fi.lambda*tspan)*(y0-g0));
fi.plotlabel = legend('implicit solution', 'explicit solution', 'exact solution', 'e-function contribution');
fi.h_e_label = uicontrol ("style", "text",...
"string", sprintf("h for explicit solver = %.3f, %d steps", h_e, tmax/h_e),...
"horizontalalignment", "left",...
"position", [600,10,400,30]);
fi.h_i_label = uicontrol ("style", "text",...
"string", sprintf("h for implicit solver = %.3f, %d steps", fi.h_i, tmax/fi.h_i),...
"horizontalalignment", "left",...
"position", [600,40,400,30]);
fi.y0_label = uicontrol ("style", "text",...
"string", sprintf("y0 for both solvers = %.2f", y0),...
"horizontalalignment", "left",...
"position", [600,70,300,30]);
fi.lambda_label = uicontrol ("style", "text",...
"string", sprintf("lambda = %.2f", fi.lambda),...
"horizontalalignment", "left",...
"position", [600,100,300,30]);
fi.lambda_check_label = uicontrol ('style', 'text',...
'string', sprintf('h_e = %.1f * h_lim (h_lim = 2/abs(lambda))', h_e / (2/abs(fi.lambda))),...
'horizontalalignment','left',...
'position', [900, 100, 500, 30]);
fi.g = substr(get(fi.g_field,'string'),6);
fi.ydot = uicontrol ("style", "text",...
"string", sprintf("ODE: y' = -%.1f (y - %s) + [%s]'", fi.lambda, fi.g, fi.g),...
"horizontalalignment", "left",...
"position", [1000,40,400,30]);
if h_e / (2/abs(fi.lambda)) >= 1
set (fi.lambda_check_label, 'foregroundcolor', 'red');
set (fi.lambda_check_label, 'string', sprintf('h_e = %.1f * h_lim (h_lim = 2/abs(lambda)), divergence!', h_e / (2/abs(fi.lambda))));
endif
endif
endfunction
fi.update_button = uicontrol('style','pushbutton',...
'string','Update',...
'callback',@updatefig,...
'position',[10,10,100,30]);
fi.quit_button = uicontrol('style','pushbutton',...
'string','Quit',...
'callback',@updatefig,...
'position',[1000,10,100,30]);
fi.h_e_slide = uicontrol('style','slider',...
'min',0.01,...
'max',2,...
'value',0.5,...
'callback',@updatefig,...
'position',[150,10,400,30]);
fi.h_i_slide = uicontrol('style','slider',...
'min',0.01,...
'max',2,...
'value',0.5,...
'callback',@updatefig,...
'position',[150,40,400,30]);
fi.y0_slide = uicontrol('style','slider',...
'min',0.1,...
'max',10,...
'value',0.1,...
'callback',@updatefig,...
'position',[150,70,400,30]);
fi.lambda_slide = uicontrol('style','slider',...
'min',0.01,...
'max',10,...
'value',2,...
'callback',@updatefig,...
'position',[150,100,400,30]);
fi.g_label = uicontrol ("style", "text",...
"string", sprintf("g(t) = "),...
"horizontalalignment", "left",...
"position", [1000,70,400,30]);
fi.g_field = uicontrol('style','edit',...
'string','@(t) cos(t)',...
'callback',@updatefig,...
'position',[1050,70,350,30]);
set (gcf, "color", get(0, "defaultuicontrolbackgroundcolor"))
guidata(gcf,fi);
updatefig(gcf,true);
Matlab Code
Show code cell source
% Matlab equivalent
close all
clearvars
fi.fig = figure('position',[0.5 0.5 1450 700]);
fi.ax = axes("position",[0.05 0.3 0.6 0.7]);
fi.update_button = uicontrol('style','pushbutton',...
'string','Update',...
'callback',@updatefig,...
'position',[10,10,100,30]);
fi.quit_button = uicontrol('style','pushbutton',...
'string','Quit',...
'callback',@updatefig,...
'position',[1000,10,100,30]);
fi.h_e_slide = uicontrol('style','slider',...
'min',0.01,...
'max',2,...
'value',0.5,...
'callback',@updatefig,...
'position',[150,10,400,30]);
fi.h_i_slide = uicontrol('style','slider',...
'min',0.01,...
'max',2,...
'value',0.5,...
'callback',@updatefig,...
'position',[150,40,400,30]);
fi.y0_slide = uicontrol('style','slider',...
'min',0.1,...
'max',10,...
'value',0.1,...
'callback',@updatefig,...
'position',[150,70,400,30]);
fi.lambda_slide = uicontrol('style','slider',...
'min',0.01,...
'max',10,...
'value',2,...
'callback',@updatefig,...
'position',[150,100,400,30]);
fi.g_label = uicontrol ("style", "text",...
"string", sprintf("g(t) = "),...
"horizontalalignment", "left",...
"position", [1000,70,400,30]);
fi.g_field = uicontrol('style','edit',...
'string','@(t) cos(t)',...
'callback',@updatefig,...
'position',[1050,70,350,30]);
set (gcf, "color", get(0, "defaultuicontrolbackgroundcolor"))
guidata(gcf,fi);
updatefig(gcf,true);
function updatefig(obj, init)
if nargin <2
init = false;
else
init = true;
end
fi = guidata(obj);
replot = false;
recalc = false;
switch (obj)
case {fi.update_button}
recalc = true;
replot = true;
case {fi.quit_button}
close all;
case {fi.h_e_slide,fi.h_i_slide,fi.y0_slide,fi.update_button,fi.lambda_slide}
recalc = true;
case {fi.g_field}
recalc = true;
end
if (recalc || init)
%% input parameters
h_e = get(fi.h_e_slide, 'value');
fi.h_i = get(fi.h_i_slide, 'value');
y0 = get(fi.y0_slide, 'value');
fi.lambda = get(fi.lambda_slide, 'value');
fi.fcn_g = str2func(get(fi.g_field,'string'));
%% explicit form of ODE, g' with finite differences
fi.fcn_proth = @(t,y) - fi.lambda* (y - fi.fcn_g(t)) + (fi.fcn_g(t+fi.h_i)-fi.fcn_g(t-fi.h_i))/(2*fi.h_i);
%% time scale
tmin = 0;
tmax = 10;
tspan = tmin:0.01:tmax;
%% base function g
g0 = fi.fcn_g(0);
%% solving with explizit Euler method
t_e = tmin:h_e:tmax;
fi.y_e = zeros(size(t_e));
y_e(1) = y0;
for i = 2:length(t_e)
y_e(i) = y_e(i-1) + h_e * fi.fcn_proth(t_e(i-1),y_e(i-1));
end
%% solving with implicit Euler method
t_i = tmin:fi.h_i:tmax;
y_i=zeros(size(t_i));
y_i(1)=y0;
for i = 2:length(t_i)
y_i(i) = ( y_i(i-1) + fi.h_i*fi.lambda*fi.fcn_g(t_i(i)) + fi.fcn_g(t_i(i))-fi.fcn_g(t_i(i-1))) / (1+fi.h_i*fi.lambda);
end
replot = true;
end
if (replot)
fi.plot = plot(t_i,y_i,t_e,y_e,tspan, fi.fcn_g(tspan) + exp(-fi.lambda*tspan)*(y0-g0), tspan, exp(-fi.lambda*tspan)*(y0-g0));
fi.plotlabel = legend('implicit solution', 'explicit solution', 'exact solution', 'e-function contribution');
fi.h_e_label = uicontrol ("style", "text",...
"string", sprintf("h for explicit solver = %.3f, %d steps", h_e, tmax/h_e),...
"horizontalalignment", "left",...
"position", [600,10,400,30]);
fi.h_i_label = uicontrol ("style", "text",...
"string", sprintf("h for implicit solver = %.3f, %d steps", fi.h_i, tmax/fi.h_i),...
"horizontalalignment", "left",...
"position", [600,40,400,30]);
fi.y0_label = uicontrol ("style", "text",...
"string", sprintf("y0 for both solvers = %.2f", y0),...
"horizontalalignment", "left",...
"position", [600,70,300,30]);
fi.lambda_label = uicontrol ("style", "text",...
"string", sprintf("lambda = %.2f", fi.lambda),...
"horizontalalignment", "left",...
"position", [600,100,300,30]);
fi.lambda_check_label = uicontrol ('style', 'text',...
'string', sprintf('h_e = %.1f * h_lim (h_lim = 2/abs(lambda))', h_e / (2/abs(fi.lambda))),...
'horizontalalignment','left',...
'position', [900, 100, 500, 30]);
fi.g = extractAfter(get(fi.g_field,'string'),5);
fi.ydot = uicontrol ("style", "text",...
"string", sprintf("ODE: y' = -%.1f (y - %s) + [%s]'", fi.lambda, fi.g, fi.g),...
"horizontalalignment", "left",...
"position", [1000,40,400,30]);
if h_e / (2/abs(fi.lambda)) >= 1
set (fi.lambda_check_label, 'foregroundcolor', 'red');
set (fi.lambda_check_label, 'string', sprintf('h_e = %.1f * h_lim (h_lim = 2/abs(lambda)), divergence!', h_e / (2/abs(fi.lambda))));
end
end
end
Hinweis
Die Matlab Dokumentation und zugehörige Blogs liefern weitere anschauliche Beispiele: